静电吸附,作为一种现代可控吸附技术,已被广泛应用于多种领域,如集成电路制造中的静电卡盘ESC、机器人攀爬以及柔性夹具等。然而,传统的静电吸附系统面临着一个巨大的挑战:它们需要高达数千伏的电压来产生足够的吸附力,而这种高压通常只能由笨重的商业电源提供。这不仅增加了成本和系统复杂性,还限制了系统的便携性和灵活性及相关技术的进一步发展。
针对这一挑战,研究团队提出了一种创新的解决方案:利用摩擦纳米发电机(RF-TENG)通过相应整流单元后为多层柔性薄膜静电阻尼器(EAD)提供持续、稳定的动力。这项技术的核心在于通过调整与静电吸附力线性相关的驱动电压可直接改变EAD的静、动态电吸附特性,从而实现对其等效阻尼系数的精确调控。经过一维质量-弹簧-EAD振动系统不同参数下的阶跃、正弦响应结果分析后得到的EAD等效阻尼系数可在0.1 N s m-1和5 N s m-1之间进行精准稳定调控。同时,这项基于摩擦电高压的多层柔性薄膜静电吸附技术,不仅在能源供应上实现了自供电,还展现了轻便性、安全性、可靠性、高效性、环保性、便携性和易操作性等特点,为未来静电吸附技术发展和摩擦纳米发电机的高压应用树立了新标杆。
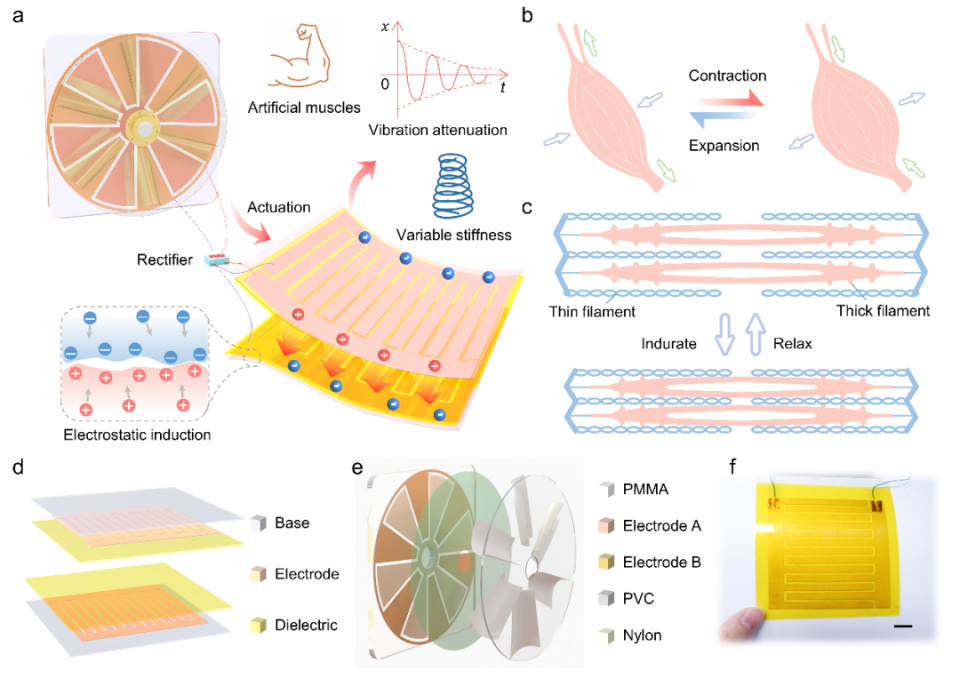
图1 自供电静电吸附系统结构和原理。(a)系统组成包括旋转式摩擦纳米发电机(RF-TENG)、整流单元和静电阻尼器(EAD);(b)肌肉收缩和扩张原理;(c)肌肉变刚度原理;(d)EAD结构爆炸示意图;(e)RF-TENG结构爆炸示意图;(f)单片EAD实物照片。这项研究工作中薄膜EAD的阻尼大幅度增加主要依赖其内部由静电感应和极化作用导致的静电吸附力的增加。其设计灵感来源于肌肉的收缩与舒张机制,通过模拟这一自然过程,给予静电吸附膜导电电极施加摩擦高电压使其整体结构硬化,实现了类似于人工肌肉的可变刚度效果。通过精确控制旋转式摩擦纳米发电机(RF-TENG)的转速可调节其输出电压,使EAD能够在不同的应用场景中调整其整体结构对应的等效阻尼系数,从而实现可控阻尼效果。图2 基于商用电源的EAD静态吸附特性。(a)静电吸附原理;(b)EAD静态切向吸附力测试平台及梳齿电极参数定义;(c)静态切向力测试曲线;(d-i)在测试过程中不同电极类型(d)、电极宽度(e)、电极间隙(f)、介电层厚度(g)、被吸附材料(h)和介电层材料(i)下EAD切向力随电压变化情况。该自供电静电吸附系统主要由RF-TENG、整流单元和EAD组成,其中RF-TENG由定子和转子两部分组成,定子由一个矩形丙烯酸板组成,上面有两层铜箔电极并覆盖着尼龙薄膜,转子由一个圆形丙烯酸板和六片扇形聚氯乙烯(PVC)薄膜组成;EAD由两个对称部分组成,均包含相同的材料和结构,通过丝网印刷技术在聚对苯二甲酸乙二醇酯(PET)基底上制备梳状铜箔导电层,在导电层上覆盖一层聚酰亚胺(PI)介质层,形成EAD的一个部分,最后将两个相同的部分组合形成EAD。该研究的实验设计主要围绕探究电吸附薄膜阻尼器(EAD)的静态、动态吸附性能和等效阻尼系数。对于EAD静态吸附特性测量,团队使用一维力传感器和线性电机来测量EAD之间的切向吸附力。通过施加不同的电压,测量在没有电压和施加电压(最高3kV)情况下的切向力。同时,使用静电计和高压探头测量RF-TENG的开路电压、短路电流和EAD电极的负载电压。这些实验设计使得研究团队能够全面评估EAD的性能,并探索其在不同应用中的潜力。图3 RF-TENG的电学特性及基于RF-TENG的EAD静态吸附特性。(a)独立层式TENG工作原理;(b)RF-TENG电极电势分布仿真;(c,d)RF-TENG的开路电压和短路电流;(e)EAD驱动流程图;(f)EAD力学和电学测量电路原理图;(g)EAD的静态电吸附力;(h)基于不同驱动源的EAD静态吸附力。研究团队通过建立一维质量-弹簧-EAD系统振动实验平台,成功展示了EAD在不同RF-TENG转速下的动态吸附性能和等效阻尼系数的调节变化能力。实验结果表明,EAD的等效阻尼系数可以在0.1 N s m-1和5 N s m-1之间调整,这为静电吸附技术在实际应用中的潜力提供了有力证明。图4 基于RF-TENG的EAD动态吸附特性。(a)EAD结构及梳齿电极极化方向示意图;(b)一维质量-弹簧-EAD系统振动实验台模型图;(c)振动实验台局部实物图;(d,e)基于FWR和DVR的振动系统阶跃响应曲线;(f,g)基于FWR和DVR的振动系统正弦响应曲线;(h)最大超调量减少率及等效阻尼系数λ;(i)偏移量减少率及等效阻尼系数λ。为了进一步验证EAD的实际应用价值,研究团队设计并测试了仿鱼鳞结构、可变刚度关节和重载起重器。这些演示不仅展示了EAD在轻质振动衰减、灵活的机器人臂抓取、可变刚度关节和局部硬化方面的应用潜力,更突显了其在先进布料防护、人工肌肉技术、负载提升等领域的广泛应用前景。图5 基于RF-TENG的自供电静电吸附系统应用。(a)仿鱼鳞结构;(b)有无电能驱动时鳞片结构变化情况;(c)有无电能驱动时鳞片结构抵抗外界冲击测试实验图;(d)变刚度关节原理图;(e)有无电能驱动时关节的刚度变化情况;(f)应用电路原理图;(g)负重提取实验。团队提出了一种基于摩擦高电压的薄膜静电阻尼器(EAD),并利用旋转独立层式摩擦纳米发电机(RF-TENG)作为高压电源,通过调节RF-TENG电学输出产生的可变静电力来模拟人工肌肉的可变刚度效应。同时,通过一维质量-弹簧-EAD振动系统的实验,研究了EAD的动态吸附性能及其等效阻尼。实验结果表明,等效阻尼系数可以在0.1 N s m-1和5 N s m-1之间调控,验证了通过改变输出电压可精确调节等效阻尼。此外,通过设计和测试仿鱼鳞结构、可变刚度关节和重载提升器,验证了EAD的实际应用潜力。这项研究在电吸附技术领域实现了一个重要的技术突破,提供了一种新型的、可持续的、可控的阻尼解决方案,并展示了其在多个潜在应用领域中的实用性。该研究工作得到了国家自然科学基金项目和国家重点研发计划等项目的支持,通讯作者为清华大学机械系程嘉副研究员与博士后杨泽助理研究员,第一作者为清华大学硕士研究生赖哲民,相关研究以题为“Thin Film Electrostatic Adsorption Damper Based on Triboelectric High-Voltage”的论文发表于最新一期《Advanced Functional Materials》上。