近日,中国科学院理化技术研究所和北京林业大学联合团队在Nature Communications上发表了一篇题为《Transformable 3D Curved High-Density Liquid Metal Coils – An Integrated Unit for General Soft Actuation, Sensing and Communication》的研究论文,展示了一种可变形的高密度三维曲面液态金属线圈(HD-LMC)技术,实现了柔性执行、感知与通讯功能一体化集成,可望为软体机器人领域带来变革。文章第一作者为理化所博士生李楠,通讯作者为理化所刘静研究员和北林王磊副教授。
传统的刚性线圈在现代智能设备中扮演着不可或缺的角色,将其予以柔性化是软体机器人的核心需求。然而,柔性线圈稀疏的结构和较高的制备难度限制了其在软体机器人中的应用。在此项工作中,研究团队成功开发出一种可变形的三维高密度液态金属线圈(HD-LMC),这种线圈不仅在结构密度上超越了传统的漆包线,而且展示了出色的柔性和多功能性,实现了执行、感知和通讯功能一体化集成。此外,该HD-LMC技术具有广泛的适用性,其制造原理不仅适用于PDMS,还可扩展到环氧树脂、医用硅胶和Ecoflex等多种基材。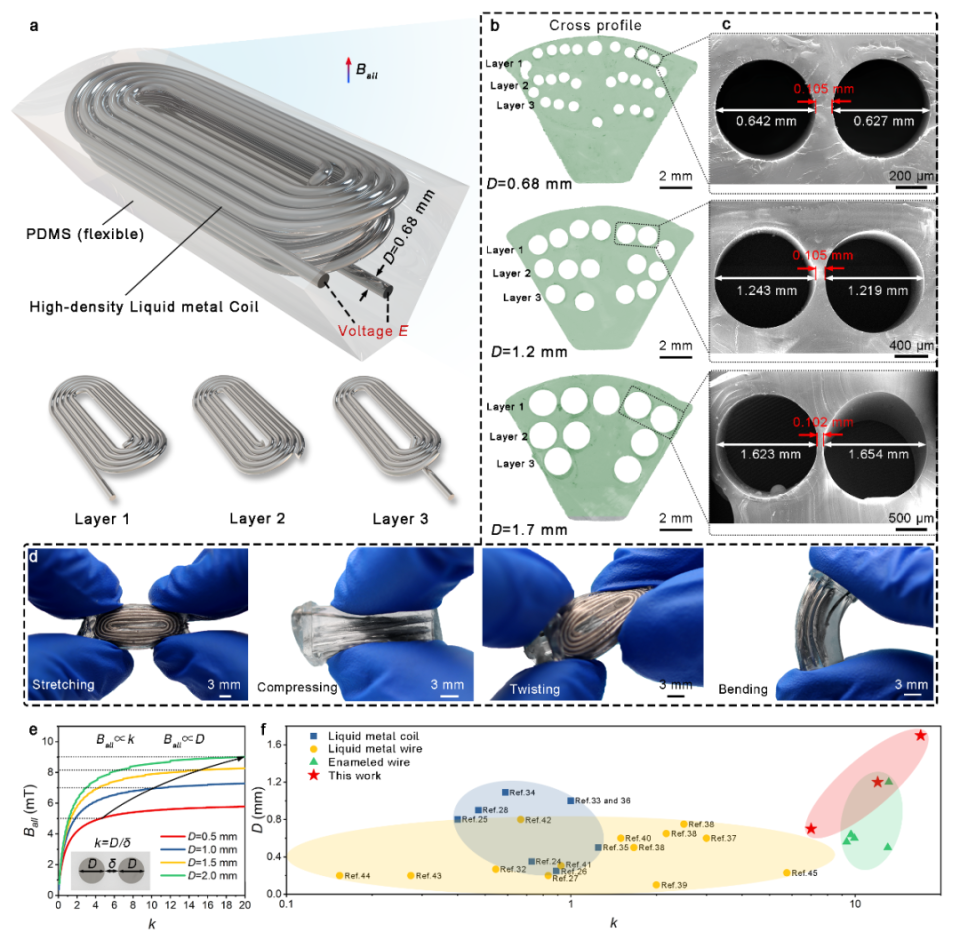
研究团队对高密度液态金属线圈进行了全方位的机械、电气、磁性和热特性测试。结果显示,HD-LMC在承受压力、压缩、扭曲和弯曲时表现出极高的机械可靠性。同时,HD-LMC在电气特性方面也表现优异。此外,HD-LMC在激励电流下产生的磁场强度也显著增强,并且能够在高电流下承受焦耳热效应。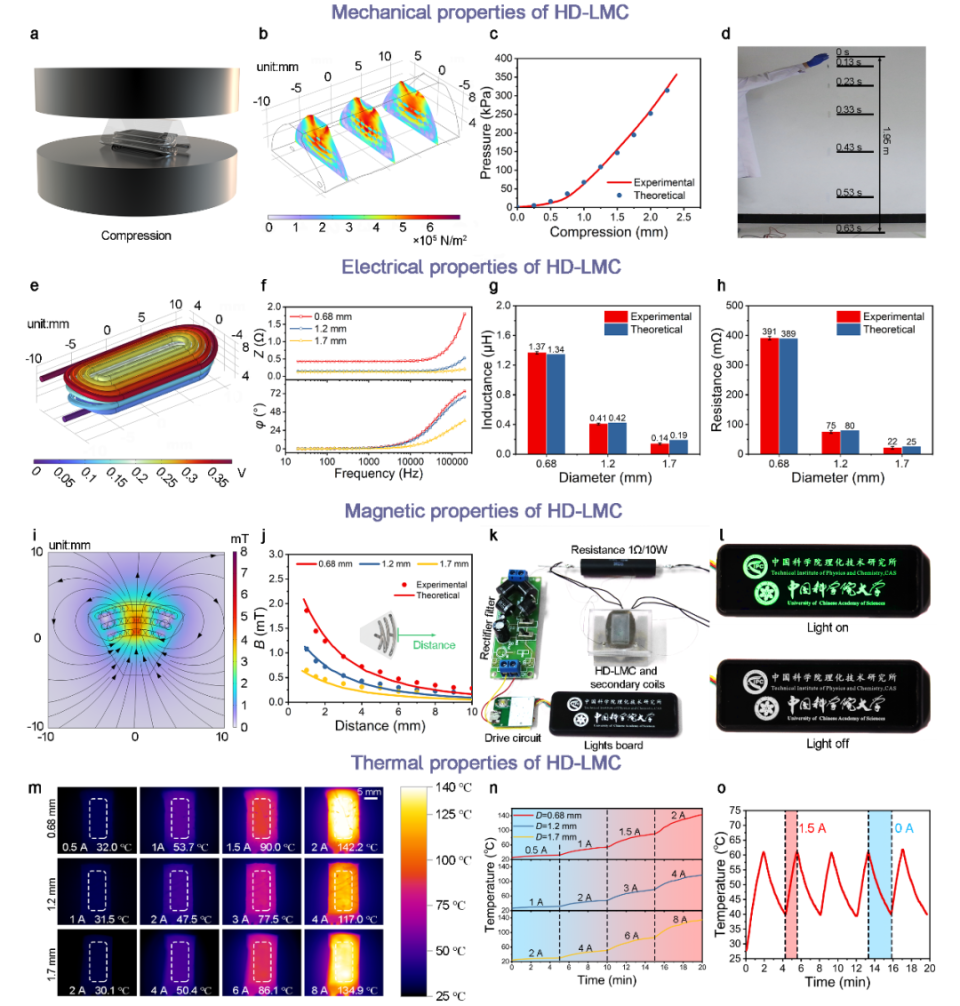
高密度液态金属线圈的多功能特性使其成为各种传感应用的理想选择。研究团队展示了HD-LMC在压力传感、温度传感、非接触距离传感和近场通信中的应用。HD-LMC不仅能够实现环境的物理交互,还能进行信息交换。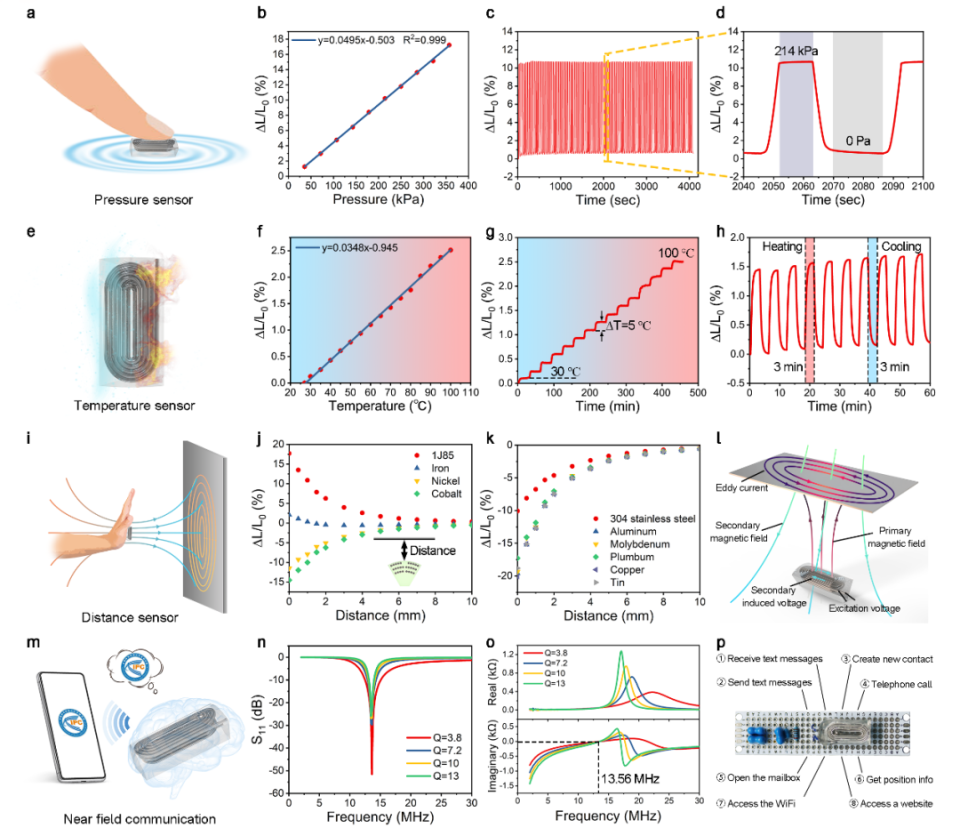
图3. 高密度液态金属线圈集成单元用于压力、温度、距离传感和近场通信基于高密度液态金属线圈的电磁驱动器,研究团队成功构建了一个能够精确控制尾部摆动的仿生软体河豚机器人。通过调节输入电流,机器人能够在水中实现连续的尾部摆动运动,展示了出色的运动控制能力。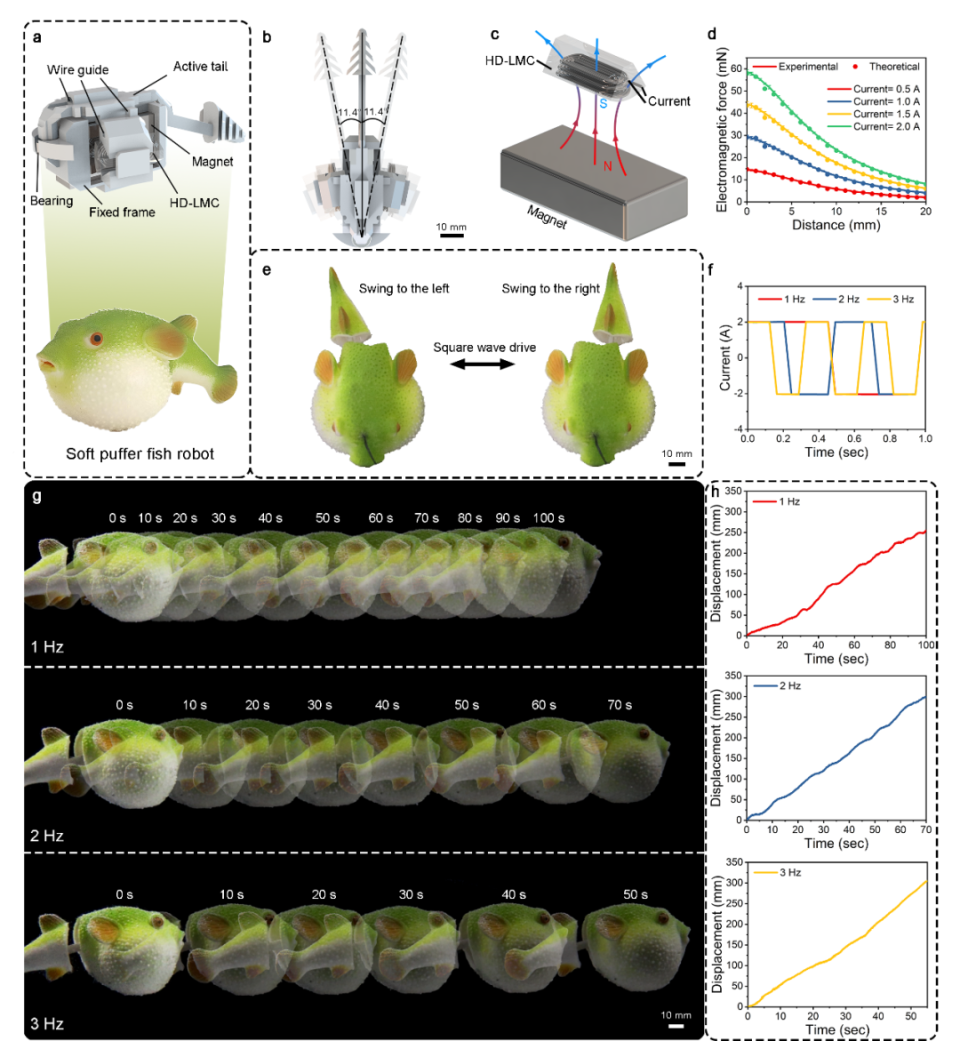
图4. 采用高密度液态金属线圈电磁驱动器的仿生河豚研究团队还展示了一种基于高密度液态金属线圈的高速旋转机器人,该机器人通过编程电流实现精确控制,并具备位置识别和速度反馈功能。六个HD-LMC单元组成的完美轮形结构在三相交流电的激励下实现高速旋转,展示了出色的运动性能和反馈能力。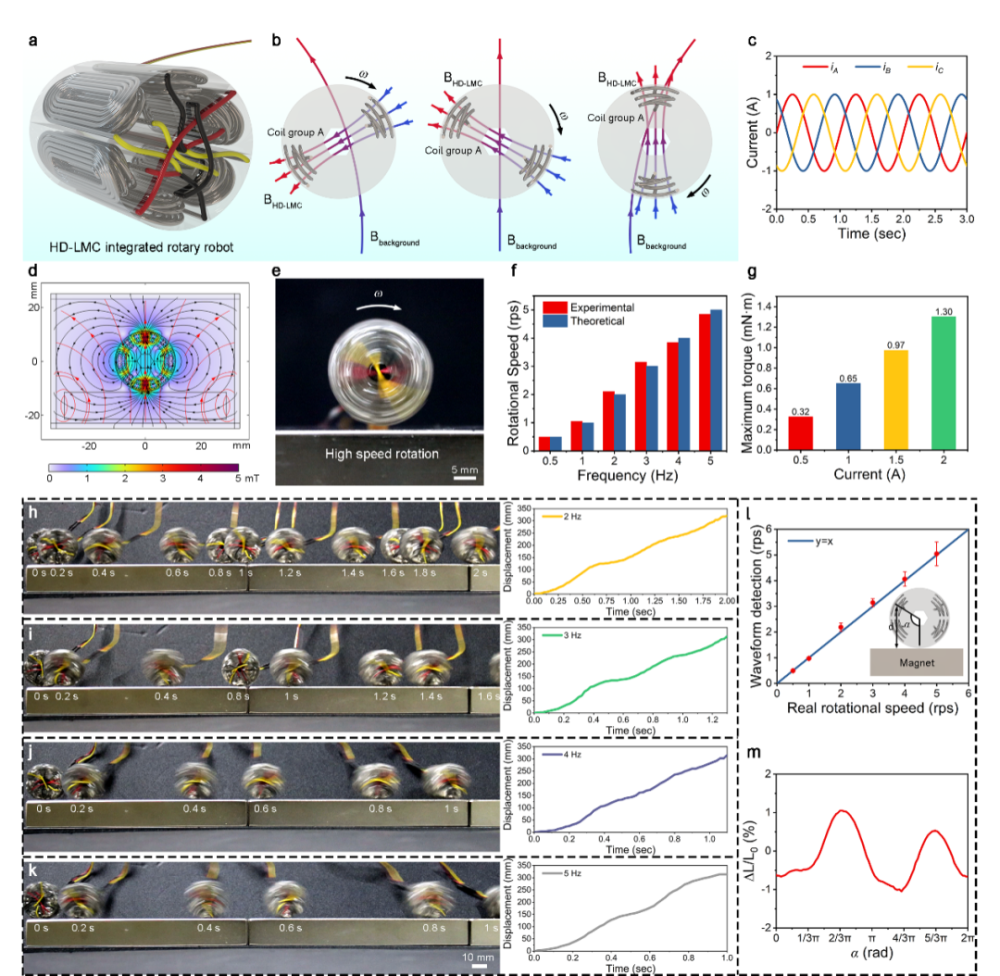
图5. 具有位置识别和速度反馈的高精度高速旋转机器人高密度液态金属线圈技术展示了在柔性机器人领域的巨大潜力,涵盖了从传感器、执行器到通信和电源系统的多方面应用。这一研究为未来柔性智能机器人的发展提供了新的思路和技术路线,推动了机器人技术向更智能、更灵活、更贴近人类的方向发展。