不同于智能座舱的单本规则,智驾分了4本,这4本也引申出4个智驾技术的概念。- 中国智能网联汽车技术规程(C-ICAP)-基础行车辅助测评规则
- 中国智能网联汽车技术规程(C-ICAP)-领航行车辅助测评规则
- 中国智能网联汽车技术规程(C-ICAP)-基础泊车辅助测评规则
- 中国智能网联汽车技术规程(C-ICAP)-记忆泊车辅助测评规则
按照使用场景的不同,智驾可以分为行车和泊车两大类。其中,基础行车和基础泊车是必测项,代表着有必要做这个测评的车辆的基础功能。而领航行车(当基础行车辅助中的系统提示和脱手检测为满分时,可进行领航辅助驾驶的测试)和记忆泊车(当基础泊车辅助得分≥70分时,可进行记忆泊车测试)属于增测项,算是当下技术与法规下的更高阶的智驾能力,是基础功能很不错之后的锦上添花。它们实际上已经覆盖了当今所有的智能驾驶的场景,也即L1~L2++辅助驾驶。毕竟,如果我们号称达到了L3自动驾驶,就需要越过一个临界值——系统负责监控驾驶环境,这就会涉及到几乎最重要的一个问题——事故后的责任归属。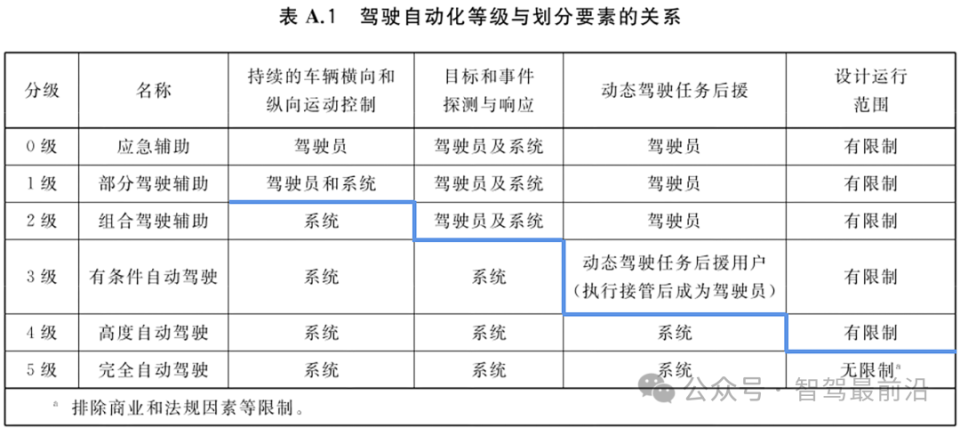
基础行车辅助主要包括自适应巡航系统(ACC)、车道居中控制系统(LCC)和组合驾驶辅助系统。实际上,尽管自动紧急制动(AEB)属于L0功能,但对于行车安全的价值比较高,也被以低权重的方式考虑在内了。前两者是非常典型的两大ADAS功能,分别实现了初步的车辆纵向控制和横向控制,它们也是几乎直接吻合了L1的定义(来源于GB/T 40429-2021:汽车驾驶自动化分级):1级驾驶自动化(部分驾驶辅助)系统在其设计运行条件下持续地执行动态驾驶中的车辆横向或纵向运动控制,且具备与车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。组合驾驶辅助则直接与GB/T 40429中L2的中文名称一致,定义与L1如出一辙,仅差在“和”这一字,重点在于横纵向的同时控制(如打灯变道、自适应巡航控制与车道保持的融合):2级驾驶自动化(组合驾驶辅助)系统在其设计运行条件下持续地执行动态驾驶中的车辆横向和纵向运动控制,且具备与车辆横向或纵向运动控制相适应的部分目标和事件探测与响应的能力。领航行车这个词我们或许不熟悉,但NOA、NOP、NGP这些说法应该是耳熟能详的,它是基于导航路线实现点到点通行的组合驾驶辅助系统。仍然是L2,仍然是设计运行条件下接管率高低的问题,仍然无法实现或不敢承诺设计运行条件内系统能够执行全部动态驾驶任务。基础泊车就是人在车里操作或者人在车外遥控泊车的场景,但场景单一,条件苛刻,体验有限,也就显得有些鸡肋,但测评还是可以测评的。
记忆泊车辅助系统是指需要预先设置路径,并可根据路径完成巡航、泊入或泊出的泊车辅助系统。处理的是自动驾驶的第一步和最后一步,也就是手机app操控下的远距离一键召唤能力和一键泊车能力。最基本的评价思路仍然是进行加权量化打分(100分制)。- 划分单元与项目:整个测评规则面向辅助驾驶和智能座舱两个单元,智能座舱我们前面文章讲过了,是一个独立且整体的板块,但辅助驾驶还可以继续分为行车辅助与泊车辅助这两个与智能座舱同一级的项目,即测评规则最终可以打出3个星级(星级评价后面会讲)。
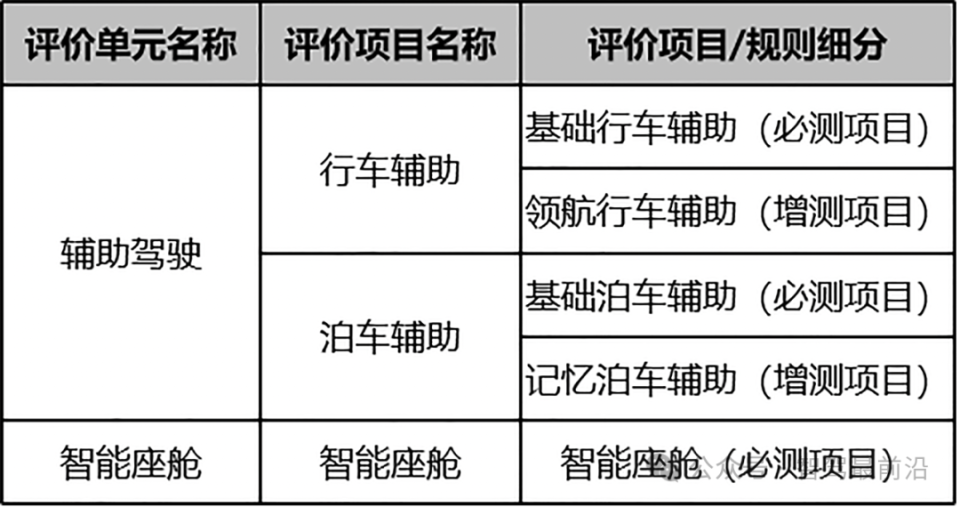
- 拆分指标:我们通过下表可以直观看到指标拆分的总览。

智能座舱得分率对应星级
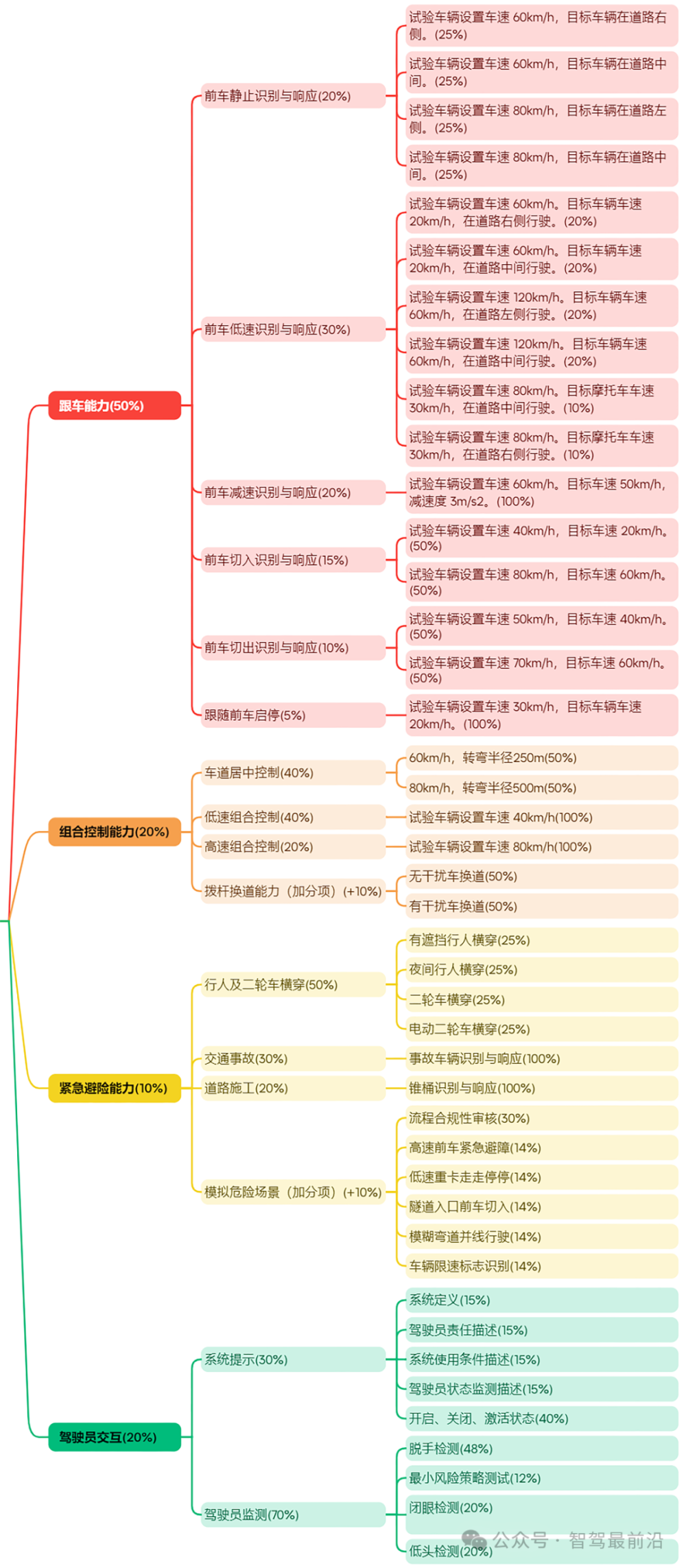
基础行车辅助最有使用价值的就是ACC,体现在指标里就是跟车能力,其权重也给到了50%。跟车中,更重要的场景给到了前车低速识别与响应(30%权重),映射到驾车环境里,就是堵车走走停停的过程中车辆要能稳定跟随且平稳制动(100分时,最大减速度不超过5m/s2)。组合控制能力的重点在于转弯时的车道居中能力(40%权重),以及低速时的横纵向控制(40%权重),即居中且平稳制动(100分时,最大减速度不超过5m/s2),关注点仍在于低速或典型转弯的基本环境。而如果能够支持拨杆换道这种高阶能力,会作为加分项(+10%权重),作为惊喜点的奖励。
驾驶员交互中的关键点在于驾驶员监测(70%权重)中的脱手检测(48%权重)。因为方向盘脱手既关乎驾驶任务的接管,也影响事故责任的划定,而这是智能驾驶最敏感的地带。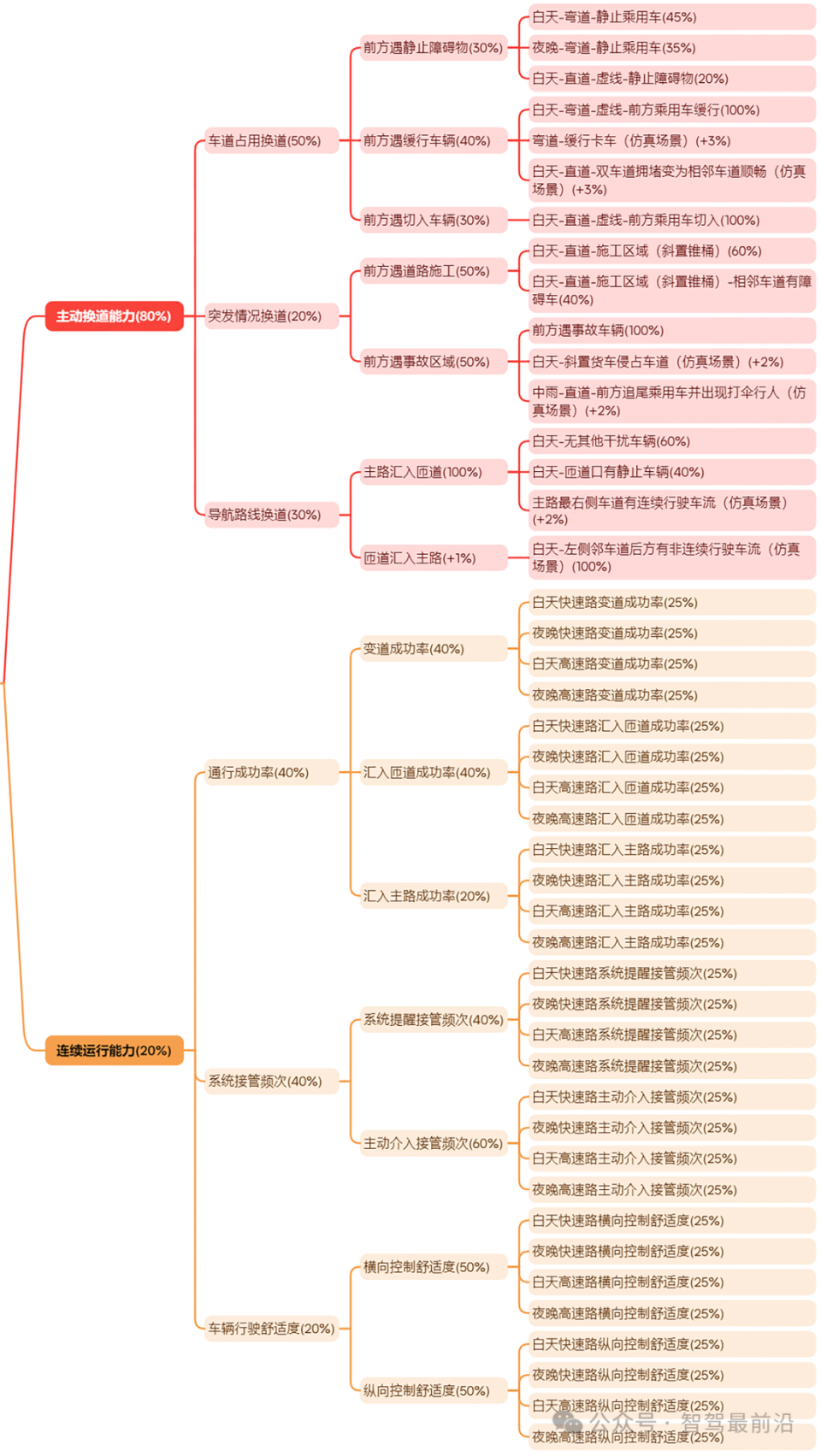
基础行车辅助基本上是被动式的横纵控制,智能化的主动性体现得不明显,而以基础行车辅助中的拨杆换道作为过渡,主动换道的出现,成为了领航行车辅助中最核心、覆盖最多场景的智能化能力。其中的车道占用换道(50%权重)显然也是换道中最多的场景。连续运行能力(20%权重)实际上属于主动换道能力的属性,其能力高低直接反映主动换道能力的高低,所以,这种拆分方式是否有优化空间,值得思考。
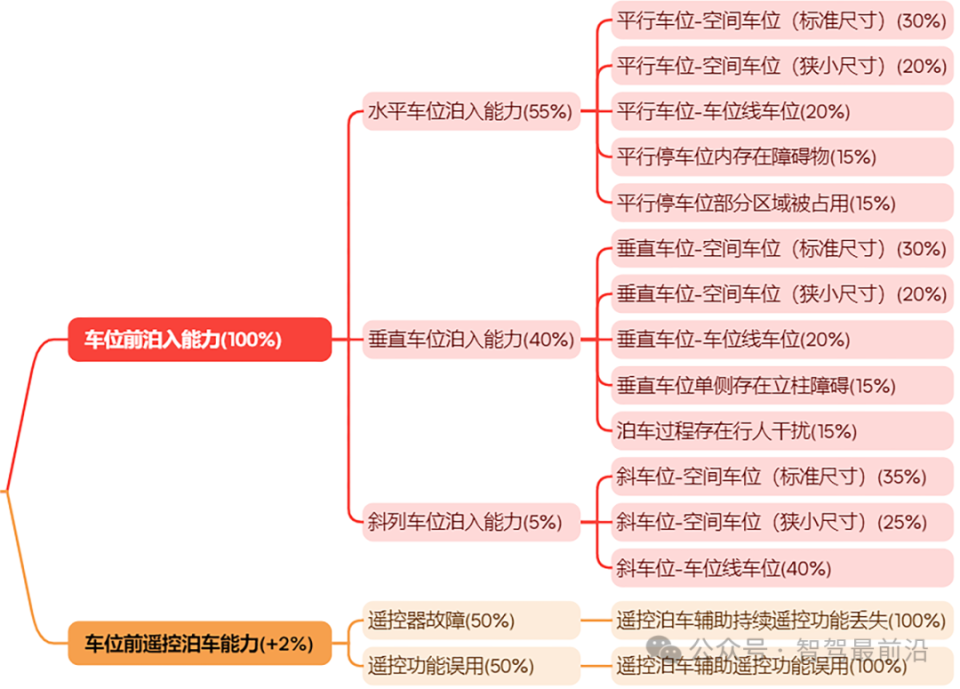
车位前的泊入能力是几乎基础泊车唯一的需求,权重给到了100%。其中,2级指标中最难的侧方停车(水平车位)给了55%的权重。最终的考察点落在不同类型车位(立体、车位线、车位有占用等)的车位搜索和实际泊车能力上。具体评价上,会从识别成功率(3次中2次成功给10分)和几把能倒进去(揉库次数≤4次给20分)、车歪不歪(停车姿态的偏移角度在±1°给25分)等维度来打分。车位前遥控泊车能力是在实际泊车能力的基础上增加的遥控功能。有时面临非常窄的车位,拿取东西不方便,有一定用处(但需要配合一键泊出的功能才有意义),算是一个加分亮点,给了+2%的加分权重。考察的重点在于遥控本身,所以2、3级指标也指向遥控器故障和误用的评价上。
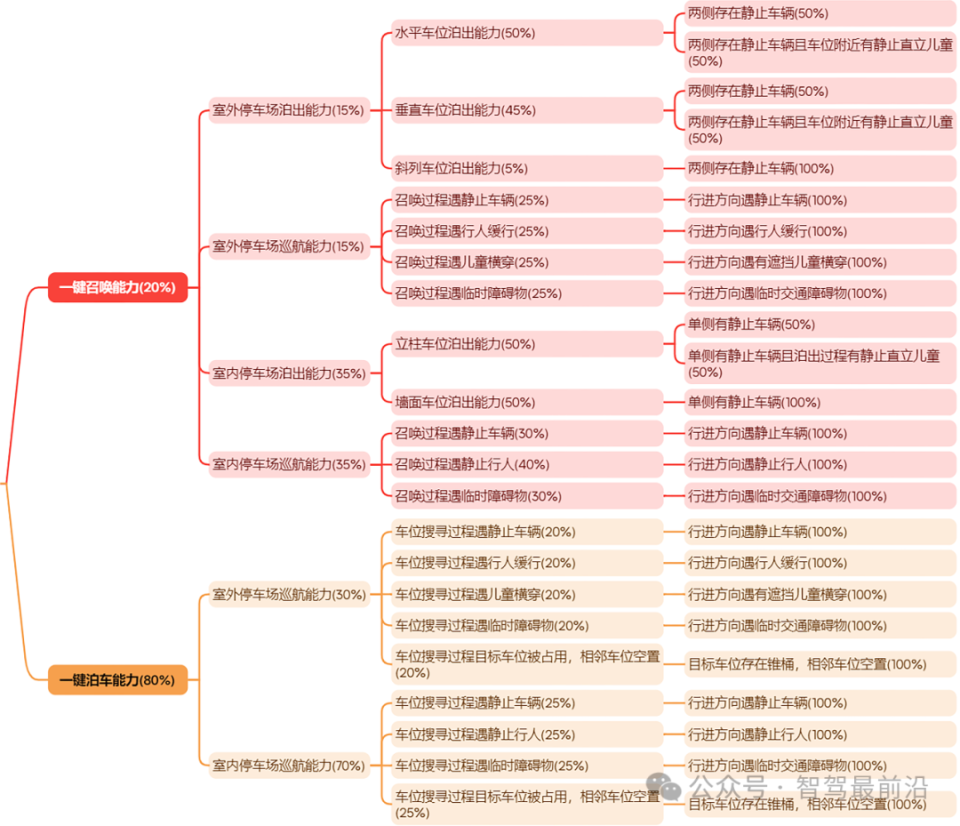
一键泊车能力(权重80%)算是比较有体验增值的功能,尤其是需要进入固定的地下等室内停车场(2级指标的室内巡航给予70%的权重)时,绕圈子找楼梯电梯的感觉属实不佳。而且,室内有相对固定的起始点、路线和终止点,实现较成熟,使用较容易。
一键召唤能力权重仅给到20%,这个其实和使用必要性有关。一键泊车是下车即走,一键召唤呢?是要下楼前提前召唤?万一电梯堵了,一时上不来呢?还是到门口在召唤?那可要在门口等一段时间了。
首先,将驾驶辅助分为行车和泊车两大板块,而两个板块又进一步分为基础和进阶(即领航行车、记忆泊车,且为增测项),2x2,形成了4份测评规则。其次,每份规则都是将整体拆分为3~4级指标,然后针对最后1级指标打分,最后按照各指标的分值乘以权重后相加的方式,逐级得到对应4个项目各自总得分。最后,4个项目两两结合,形成行车辅助和泊车辅助的星级。此外,测评的重点(也即更大的权重)放在最常用、最实用以及技术相对最成熟的那些场景,比如,堵车跟车、转弯车道居中、车道占用自动换道、车位前直接泊车和一键泊车等。智能座舱接下来会向着更佳性能和更具想象力的方向走,这同时意味着基础的功能架构趋近成熟。智能驾驶则处于分散的驾驶辅助功能走向融合,以及更整体、更主动的智能特点逐渐显现的阶段,技术路线和实现场景都处于过渡期或探索期。2022年12月发布的4本驾驶辅助测评规则和2023年10月发布的自动驾驶测评规则征求意见稿也在印证这个特点。打个比方说,现在的自动驾驶很像“望山跑死马”,评价方式也只能是阶段性的。